Причина-почему я этим решил заняться: я инвалид первой группы. Бывший конструктор, нынешний программист-я начал считать и собирать информацию. Самая большая нагрузка-вставание.
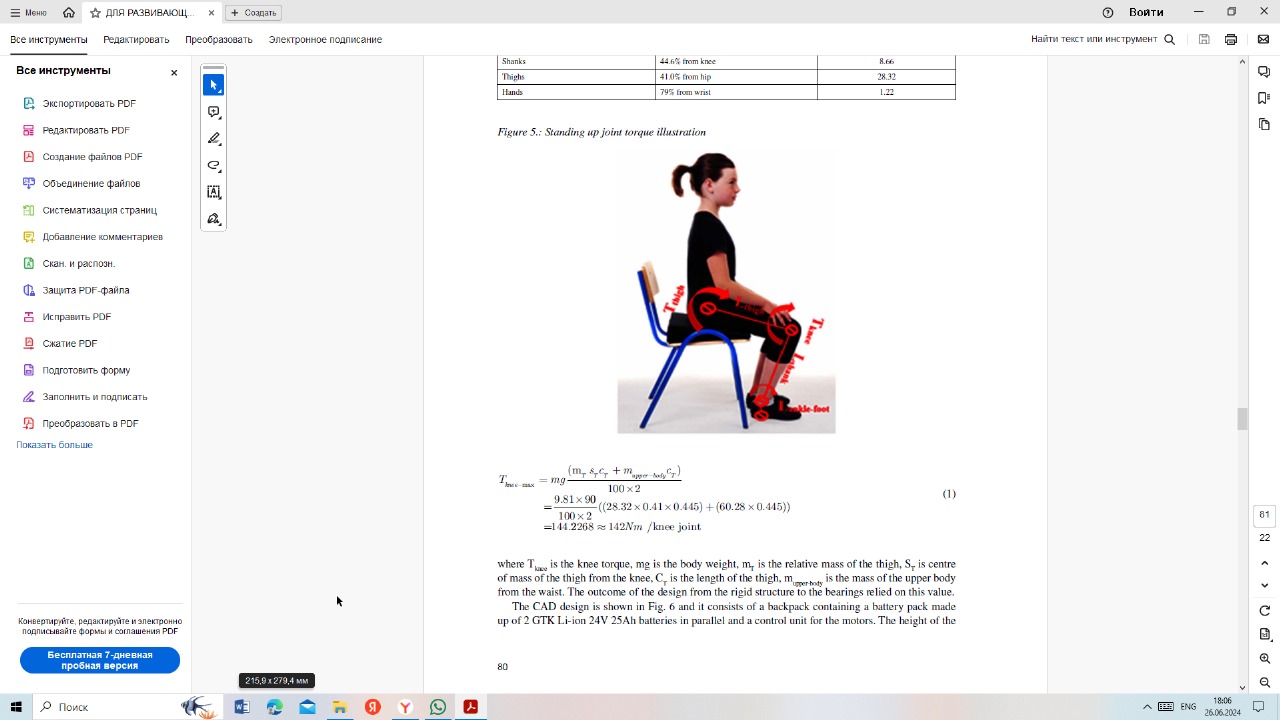
Момент необходимый- не менее 1400 кг/см. Принято решение делать все на сервоприводах. Ими довольно легко управлять и они имеют хороший момент.

Были найдены эти привода. При вставании работают все 4(2 коленных, 2 бедренных). Суммарная цифра 1520кг/см. С учетом, что ноги чуть работают и с тем, что поднимаешься и при помощи рук-считаю, что этого хватит. А для шага пары моторов хватит с лихвой. Они имеют ограничение по предельным углам, значит менее травмоопасны.
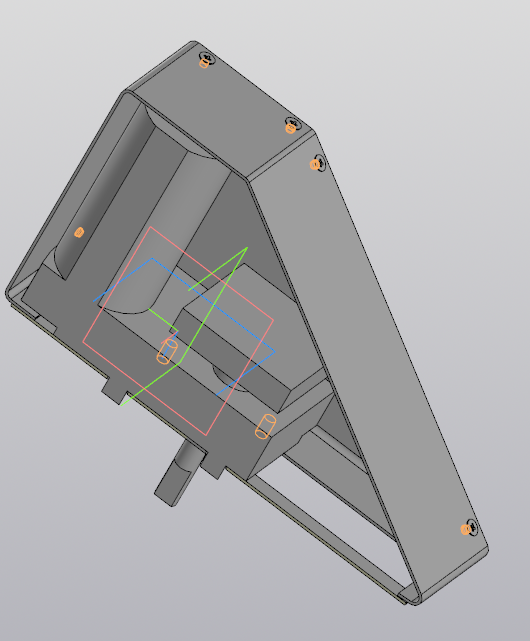
В качестве аккумуляторов выбрана пара

Хватило бы и одного, но решено было их разместить на бедрах ног и для равновесия их 2. Для безопасности они обернуты огнеупорной ватой.
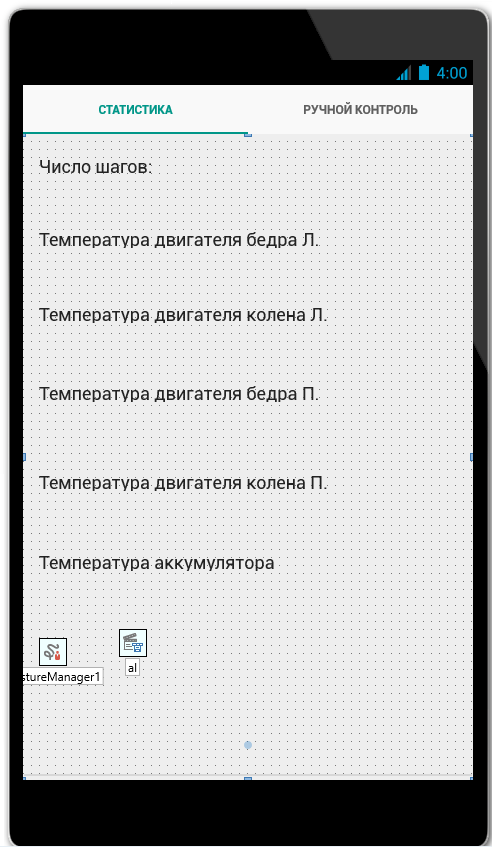
Всем управлять должна arduino uno
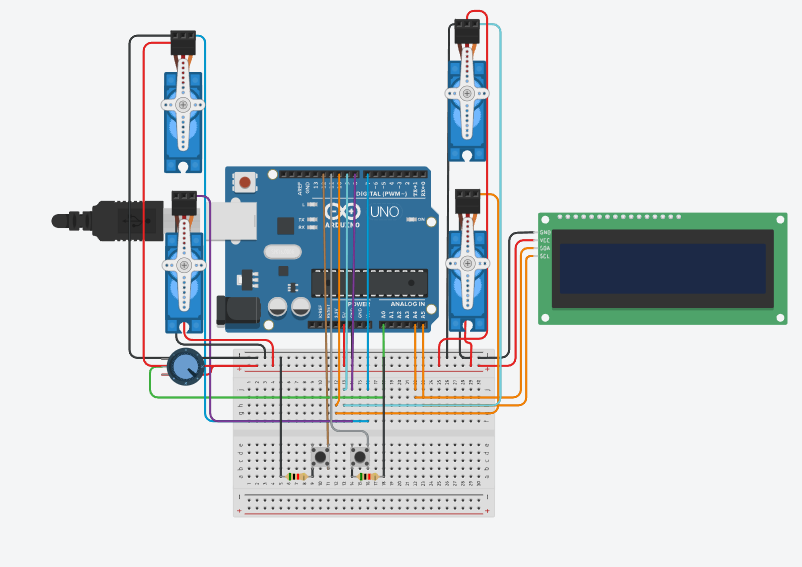
Была разработана схема и написана прошивка.
В качестве конструкционной основы выбран ортез.

Вместо ограничителей на суставах-привода.
Как я все это вижу. На ходунки провод, по 2 жилы на кнопку, проводка внутри ходунков. Кнопка под каждую руку. Можно крутилку выбора режима на ходунки вынести. Всего 3 режима: шаги на месте(кнопку слева нажал-бедро левое поднялось, голень висит, кнопку справа нажал-правое поднялось), просто ходьба, пользовательский режим(пользователь сам задает все углы). Режимы реализованы в прошивке. Сейчас стадия сборки и испытаний.
Для защиты привода разработаны из нержавейки 1мм такие кожуха.
Я заинтересован в успехе-поэтому доведу до конца.
Небольшое дополнение.








{kind=link}